Նախագծի վերաբերյալ համառոտագրություն. Մի համաշխարհային ավտոմոբիլային OEM (սկզբնական սարքավորումների արտադրող) ընկերություն արդիականացնում էր իր մարմնի սպիտակ տարբերակի (BIW) արտադրական գիծը՝ բավարարելու էլեկտրական տранսպորտային միջոցների (EV) նկատմամբ աճող պահանջարկը և բարելավելու արտադրության ճկունությունը: Հիմնական մարտահրավերը կայանում էր...
Աշխարհայացքի մեջ գտնվող մի ավտոմոբիլային OEM (սկզբնական սարքավորումների արտադրող) ընկերություն արդիականացնում էր իր մետաղական մարմնի (BIW) արտադրական գծերը՝ համապատասխանելու էլեկտրական տранսպորտային միջոցների (EV) աճող պահանջարկին և բարելավելու արտադրության ճկունությունը: Հիմնական մարտահրավերը բարձր ճշգրտությամբ կատարվող եռակցման դիրքավորման, արագ ցիկլի տևողության և հավաստի գործառնավարության ապահովումն էր արտադրամասի դժվարին պայմաններում՝ բնութագրվող բարձր ջերմաստիճանով, սփրայտերով և թրթռումներով: Պնևմատիկ տեխնոլոգիան ընտրվեց որպես հիմնական շարժաբերման լուծում՝ իր գերազանց արձագանքման արագության, բեռնվածության դիմացկունության և դժվարին պայմանների նկատմամբ դիմացկունության շնորհիվ:
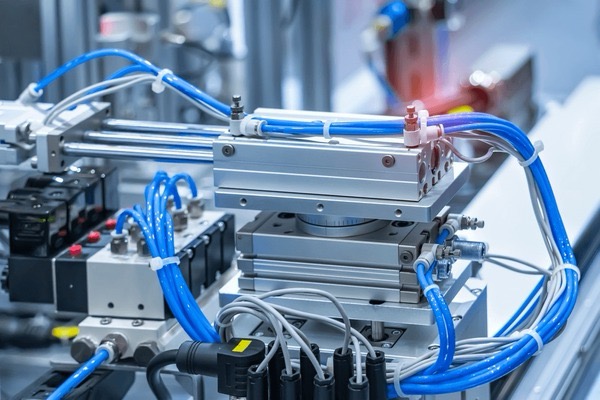
1. Ճշգրտությամբ ղեկավարվող պնևմատիկ շարժիչներ
• Տեղադրման դիրք՝ մարմնի մակերեսի սեղմման և դիրքավորման կայաններ (օրինակ՝ դռան շրջանակ, տանիք և հատակի հավաքածու):
• Տեխնիկական բնութագրեր՝ Այս շարժիչները համալրված են ինտեգրված գծային ուղեցույցներով և քայլի ճշգրտման մեխանիզմներով, որոնք ապահովում են ±0,05 մմ կրկնվող դիրքավորման ճշգրտություն՝ մարմնի պանելների միջև հաստատուն եռակցման բացվածքները երաշխավորելու համար: Երկու ուղղությամբ աշխատող կառուցվածքը ապահովում է ուժեղ սեղմման ուժ (մինչև 8 կՆ), որը կանխում է պանելների տեղաշարժը բարձր հոսանքով եռակցման ընթացքում:
• Էքսպլուատացիոն դեր՝ Երբ մարմնի շասսին մտնում է կայանում, շարժիչները միաժամանակյան երկարանում են՝ 0,3 վայրկյանում սեղմելու և դիրքավորելու պանելները, իսկ եռակցման ընթացքում (յուրաքանչյուր ցիկլի համար 10–15 վայրկյան) պահպանում են կայունություն:
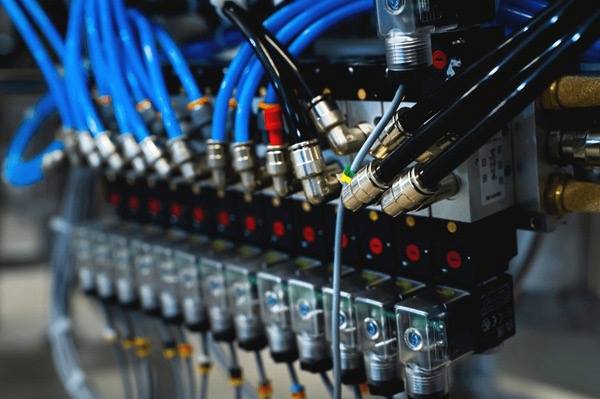
2. Բարձրաարագության պնևմատիկ փականներ
• Տեղադրման դիրք՝ Շարժիչների ակտիվացման և եռակցման փայտի դիրքավորման համար կենտրոնական կառավարման համակարգ:
• Տեխնիկական բնութագրեր՝ Պայլոտավորված էլեկտրամեխանիկական փականներ՝ ≤10 մս միացման/անջատման ժամանակով և IP67 պաշտպանության աստիճանով: Դրանք նախագծված են դիմանալու լարման թավալներին և եռակցման սարքավորումներից առաջացած էլեկտրամագնիսական միջամտությանը:
• Օպերացիոն դեր՝ Ստանալ սիգնալներ PLC-ից (ծրագրավորելի տրամաբանական կառավարիչ), որպեսզի կառավարվի սեղմված օդի հոսքի միացումը/անջատումը և ուղղությունը, ինչը հնարավորություն է տալիս մեկ կայանում 24-ից ավելի շարժիչների համաժամանակյան աշխատանքը։ Շարժիչների արագ պատասխանը ապահովում է արտադրական գծի 60 վայրկյան տևողությամբ ցիկլ՝ 30 % ավելի արագ, քան նախորդ հիդրավլիկ համակարգը։
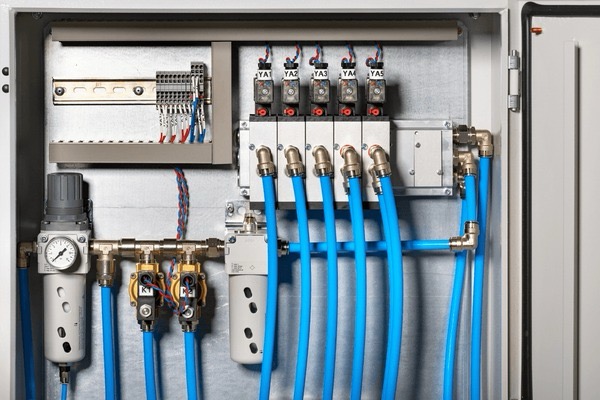
3. Օդի պատրաստման միավորներ (APU)
• Տեղադրման դիրք՝ Պնևմատիկ համակարգի մուտքը, միացված գործարանի կենտրոնական օդի սեղմիչին։
• Տեխնիկական բնութագրեր՝ Միավորված ֆիլտր-կարգավորիչ-քսանյութավորիչ (FRL) միավորներ՝ 5 մկմ մասնիկների ֆիլտրով, ջրի առանձնացուցիչով (մառախլային կետ ≤2°C) և կարգավորելի ճնշման կարգավորիչով (0,1–1,0 ՄՊա)։ Քսանյութավորիչը ատոմացված յուղ է մատակարարում՝ շարժվող մասերը մաշվածությունից պաշտպանելու համար։
• Օպերացիոն դեր. Սեղմված օդի մաքրում և պայմանավորում՝ խոնավության, փոշու և յուղի կեղտի հեռացման համար, որպեսզի ստորին հոսանքի բաղադրիչները (շարժաբաններ, կափարիչներ) աշխատեն հուսալիորեն: Դա բաղադրիչների ավարիայի հաճախականությունը նվազեցնում է 40%-ով և մեկնարկային սպասարկման միջակայքը երեք ամսից մեկ տարի երկարացնում:
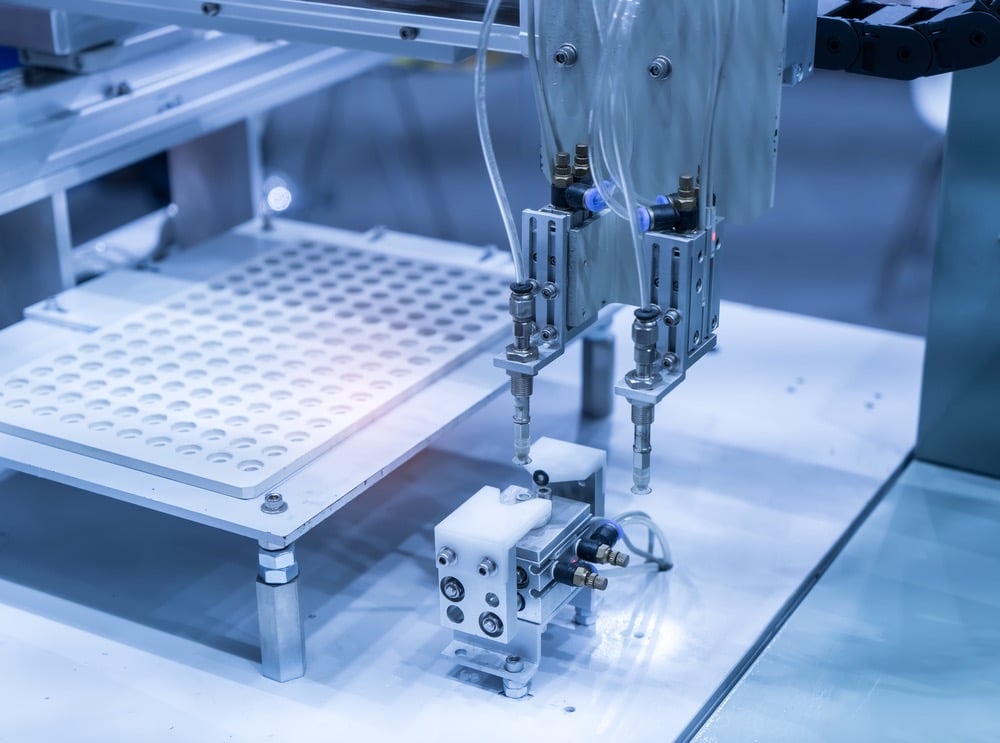
4. Պնևմատիկ բռնակներ ուժի զգայունությամբ
• Տեղադրման դիրք. Ռոբոտային թևի վերջնական սարքավորումներ եռացված մեքենայի մարմնի բաղադրիչների մշակման համար (օրինակ՝ կողային սալիկներ, հատվածային միացումներ):
• Տեխնիկական բնութագրեր. Զուգահեռ բռնակներ կարգավորելի սեղմման ուժով (0,5–5 կՆ) և ներդրված ճնշման սենսորներով: Բռնակները պատրաստված են ջերմադիմացկուն համաձուլվածքից՝ եռացման փայլացնող սարքերից առաջացած ճառագայթային ջերմության (մինչև 120°C) դիմացկունության համար:
• Օպերացիոն դեր. Ռոբոտային թևը բռնակների միջոցով վերցնում է եռացված բաղադրիչներ, որոնց զանգվածը 15–30 կգ է, իսկ ուժի սենսորները PLC-ին տրամադրում են իրական ժամանակում հետադարձ կապ՝ ապահովելու չափից ավելի սեղմման (որը կարող է բաղադրիչների ձևափոխում առաջացնել) կամ չափից պակաս սեղմման (որը մասերի գետնին ընկնելու ռիսկ է ստեղծում) խուսափելու համար: